Customized Development
Product Platform Roadmap
The stationary and mobile robots can also be used as platforms for advanced customized development. For example, we are putting rotors inside a stationary tensegrity robot to create an aerial/ ground hybrid system that can perform low level aerial flying or maneuvers, such as hopping over a fence. Next in line is the development of a floating robot as requested by our partners in flood-prone areas.
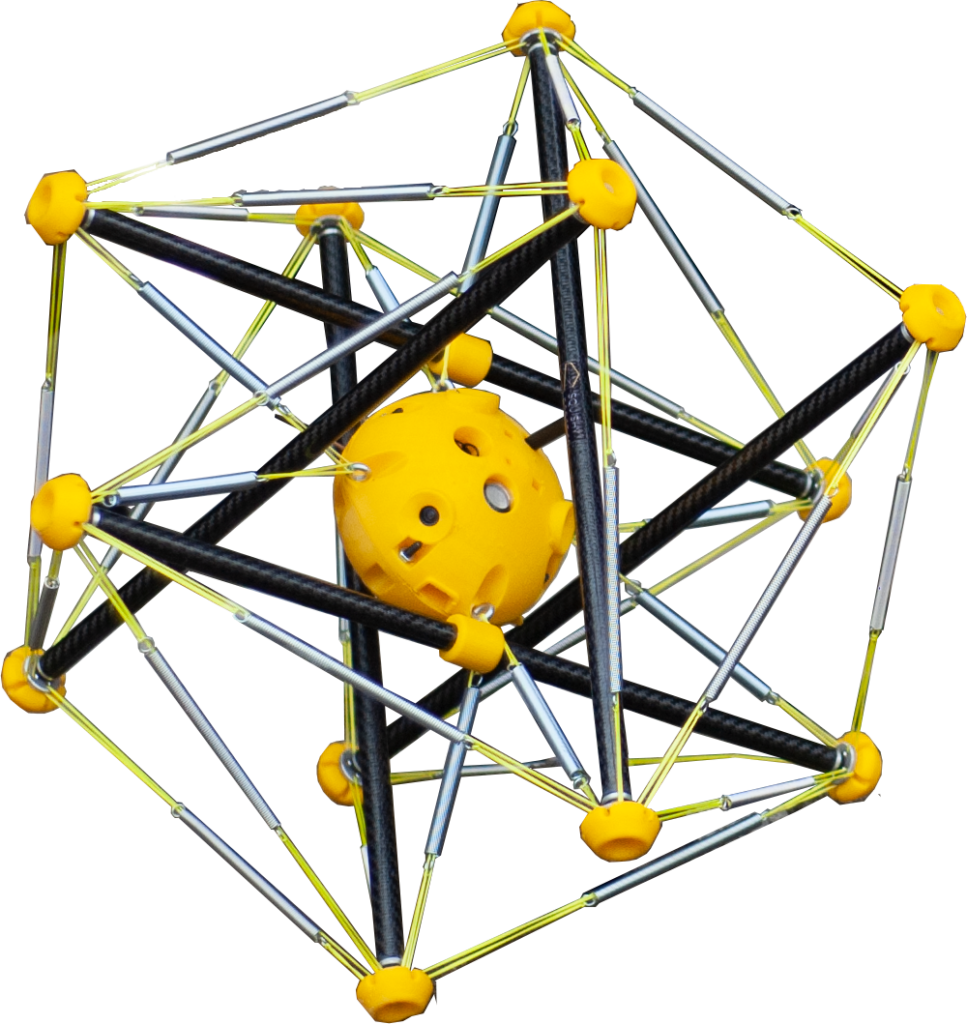
Stationary Robot
Rapidly deployable sensor/communication robots with commercial sales and testing with first responders, industry and military.
Ground Mobility
Ground-mobile robots available for sales to developers and early adopters.
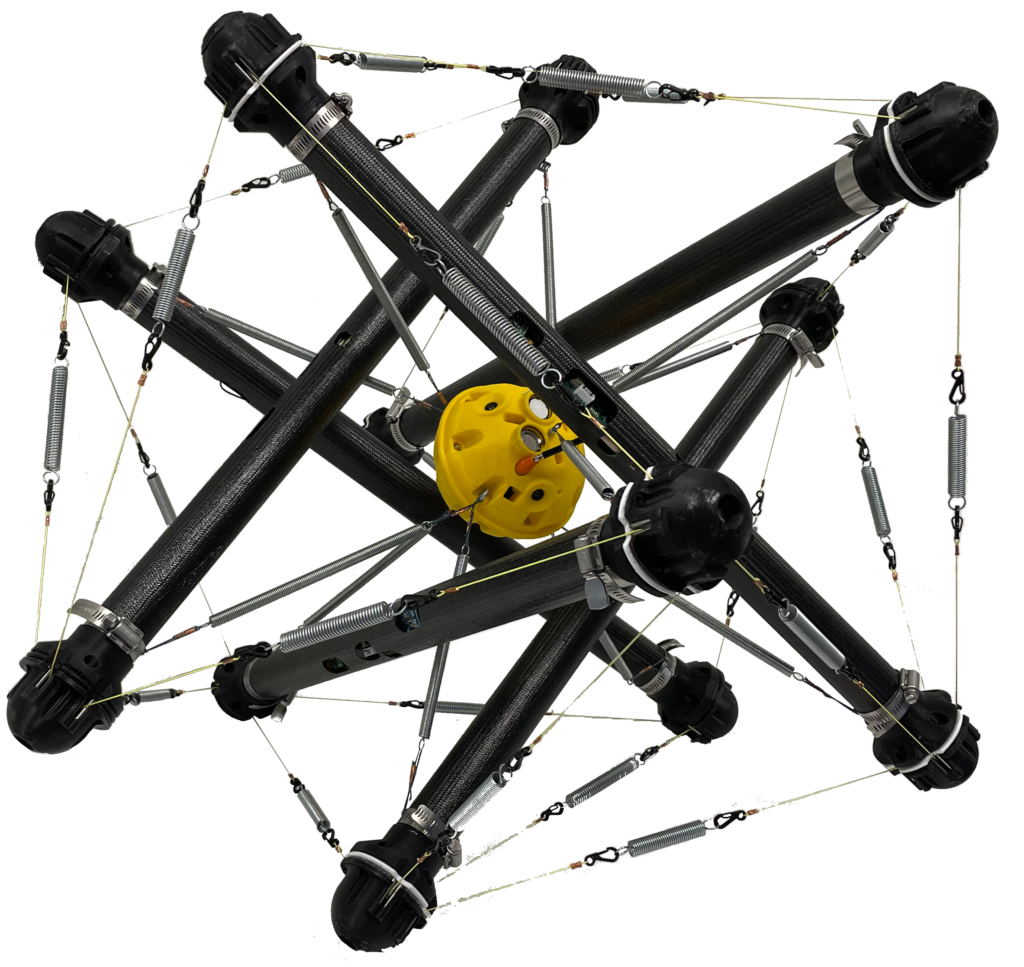
Ground Mobile Robot
The mobile robot sensor platform is available to sales to developers and early adopters. These mobile robots are designed to be remotely controlled from a safe distance or be used to walk alongside or in front of first responders. They are capable of movement along rugged terrain or slopes using our proprietary paired-cable actuations. Optimized for battery life and onboard data analytics capabilities.
Paired-Cable Schema Is Over Five Times More Efficient Than 24-Cable Actuation
M. Cera, A. A. Thompson and A. M. Agogino, “Energy-Efficient Locomotion Strategies and Performance Benchmarks using Point Mass Tensegrity Dynamics,” 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 2019, pp. 4678-4683.
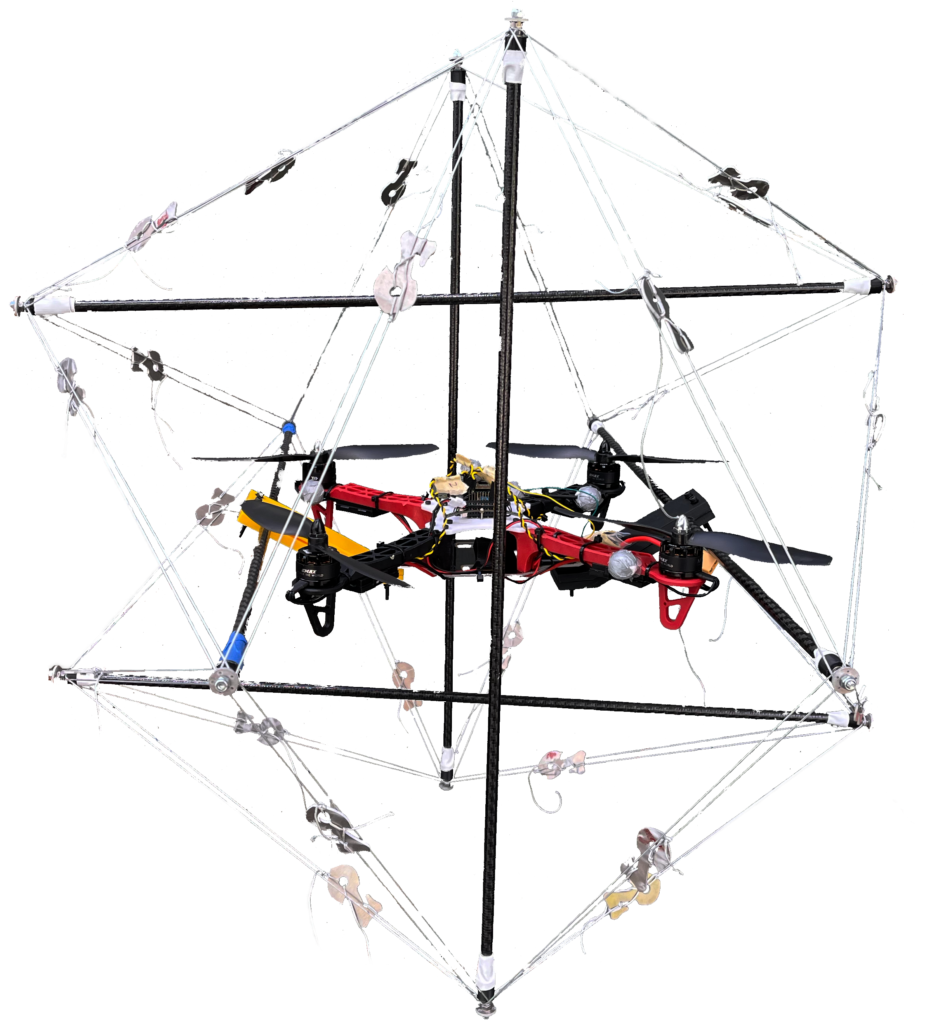
In Development: Rotor Robot
In collaboration with Dr. Mark Mueller, UC Berkeley, we are adding rotors to the structure to develop an impact-resistant aerial/ ground hybrid system that can perform low level aerial maneuvers, such as hopping over a fence or flight in enclosed spaces.
Customized: Wildfire Detection & Monitoring
We are developing a new sensor payload to be carried by the Stationary, Mobile, and Rotor Robots. This customized solution provides on-board steerable optical or imaging cameras along with gas sensors for early detection and monitoring of wildfires. Full camera frames can also be transmitted over mesh network. Robot can run real time analytics on the camera data, to provide alerts in case of a newly-started fire or equipment failures.
New: Capabilities or Options
- PID Multi-gas Sensor
- LTE Radio System
- Repeater to extend transmissions so that the signal can cover longer distances or be received on the other side of an obstruction
- Laptop Lid attachment with USB port detection, overvoltage sensing, and send/receiving of the FTDI chip, and other reliability improvement points
- TEEX-Tested® Report: Report detailing the evaluation criteria, methodology, quantitative and qualitative results from the Communications Terrain-Obstruction Testing conducted at Disaster City.
More Capabilities
As an emerging technology, there are a wide range of use cases and capabilities. Contact us to discuss your use cases or applications.